
Nel gennaio 1992, durante una violenta tempesta, una cassa di carico contenente più di 28mila paperelle gialle di gomma e altri giocattoli da bagno si rovesciò in mare da una nave che viaggiava dalla Cina a Seattle. Questi giocattoli di gomma finirono alla deriva e, dopo essere stati ritrovati in posti come le Hawaii, l’Australia e persino il Giappone, contribuirono alla ricerca scientifica svelando l’invisibile rete globale delle correnti oceaniche. Oggi piccoli robottini tascabili sono pronti per esplorare gli oceani in lungo e in largo trasportati dalle correnti, immergendosi a profondità mai raggiunte prima.
L’oceano è grande e i nostri tentativi di conoscerlo sono ancora in gran parte relegati alla sua superficie. Secondo l’Organizzazione Nazionale Oceanica e Atmosferica, circa l’80% dei mari a livello globale «non è mappato, non è osservato e risulta inesplorato», un universo blu sconosciuto tanto quanto una galassia lontana.
Le navi sono il mezzo principale per raccogliere informazioni sui mari, ma le spedizioni sono costose. Più di recente, boe robotiche chiamate “Argo float” sono andate alla deriva seguendo le correnti, immergendosi su e giù per effettuare una serie di misurazioni in profondità fino a quasi 2mila metri. Ma i nuovi robot acquatici messi a punto da un laboratorio del California Institute of Technology (conosciuto con l’abbreviativo di Caltech) potrebbero spingersi più in profondità e affrontare missioni subacquee mai sperimentate fino ad ora.
«Stiamo immaginando un approccio per l’esplorazione oceanica globale mettendo in mare sciami di mini robot di vario tipo per il monitoraggio dell’oceano, per il cambiamento climatico e per comprendere la fisica che governa gli abissi», spiega John O. Dabiri, un professore di aeronautica e ingegneria meccanica al California Institute of Technology.
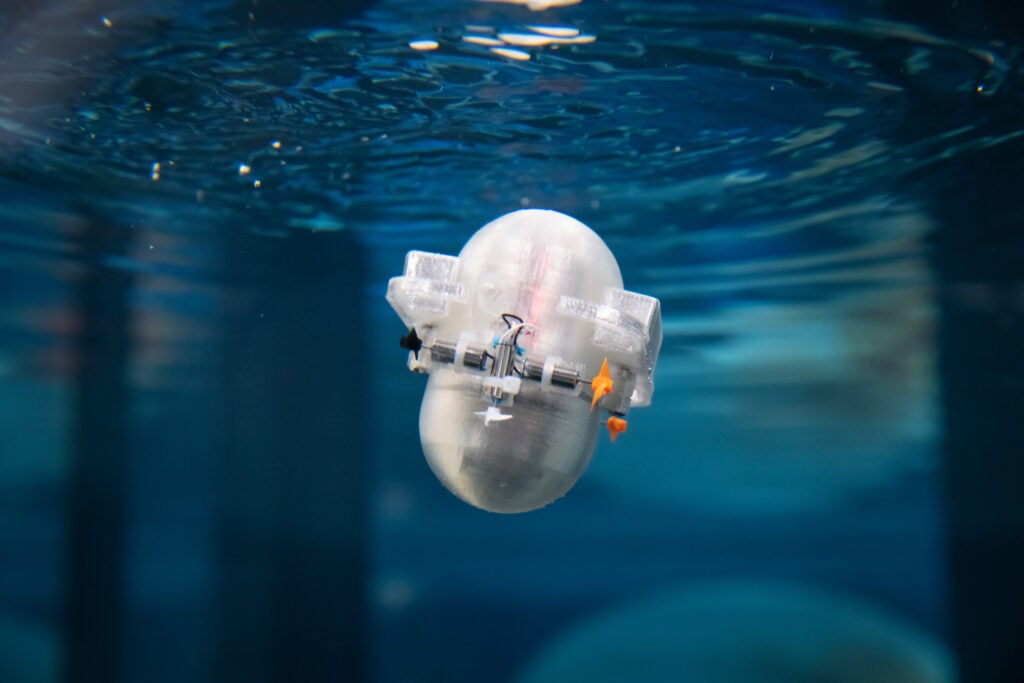
Si tratta di mini robot acquatici chiamati CARL-Bot (Caltech Autonomous Reinforcement Learning Robot), delle dimensioni di un palmo, che assomigliano a un incrocio tra una capsula e il “porta sorpresa” degli ovetti di cioccolato. Sono dotati di motori per nuotare, sono bilanciati per rimanere in posizione verticale durante le loro esplorazioni e montano sensori in grado di rilevare pressione, profondità, accelerazione e orientamento.
Tutto ciò che uno di questi robot CARL fa è consentito da un microcontrollore all’interno, supportato da un processore da 1 megabyte più piccolo di un francobollo.
Il primo CARL è stato creato e stampato in 3D a casa da uno studente del Caltech, Peter Gunnarson. I primi test eseguiti da Gunnarson sono iniziati nella sua vasca da bagno, poiché nel frattempo i laboratori di Caltech erano chiusi all’inizio del 2021 a causa del Covid.
CARL può essere controllato a distanza, ma per raggiungere le parti più profonde dell’oceano deve imparare a navigare da solo apprendendo come fare. Per questa sfida nel campo del “machine learning” è stato ingaggiato lo scienziato informatico Petros Koumoutsakos, che ha contribuito a sviluppare algoritmi di intelligenza artificiale che potrebbero insegnare a CARL ad orientarsi in base ai cambiamenti nel suo ambiente e alle esperienze passate.
CARL può decidere di adattare il proprio percorso per aggirare le correnti impetuose e arrivare a destinazione, oppure può dimorare in un luogo designato utilizzando l’energia fornita da una batteria agli ioni di litio. Il set di algoritmi sviluppato può eseguire i calcoli e inviare al robot i dati di orientamento. La programmazione consente di ricordare percorsi simili che CARL ha appreso nelle missioni precedenti sprecando così meno tempo e disperdendo meno energia, spiega Gunnarson.
Molto dell’apprendimento automatico viene svolto nella simulazione, ma trasferirlo nel mondo reale può essere più complicato, data la complessità di fattori a volte imprevedibili che entrano in gioco in mare aperto. Per questo il team di sviluppo sta iniziando le prove per simulare le correnti che il robottino si troverà ad affrontare. Il primo passo è verificare se CARL è in grado di completare compiti semplici, come immersioni ripetute.
Man mano che i test procedono, il team prevede di mettere il robot in una piscina con piccoli getti in grado di generare correnti orizzontali attraverso cui navigare. Quando il dispositivo sarà pronto, verrà spostato in una struttura più grande in grado di simulare le correnti ascendenti e discendenti. Lì, dovrà capire come mantenere una certa profondità in una regione in cui l’acqua circostante scorre in tutte le direzioni.
«In definitiva, però, vogliamo CARL alla prova nel mondo reale – afferma il professor Dabiri – . Lascerà il nido e andrà nell’oceano, l’obiettivo sarà per lui imparare a navigare da solo».
Il mini robot oceanico può lavorare insieme a strumenti già esistenti, come i galleggianti Argo, e partire per missioni di esplorazione dedicate a studi oceanografici, dato che può avvicinarsi ai fondali marini più profondi e tracciare ed etichettare organismi biologici come un banco di pesci.
«Un giorno speriamo di vedere 10mila o un milione di CARL che navigano nell’oceano per misurare le regioni a cui non possiamo accedere oggi, in modo da ottenere la fotografia di come l'oceano sta cambiando», commenta Dabiri.